|
ww.rz-journal.de
© by Rudolf Zengerle und Perry Rhodan published in PR
483
-
Abdruck mit freundlicher
Genehmigung der Pabel-Moewig Verlag KG, Rastatt
|
|
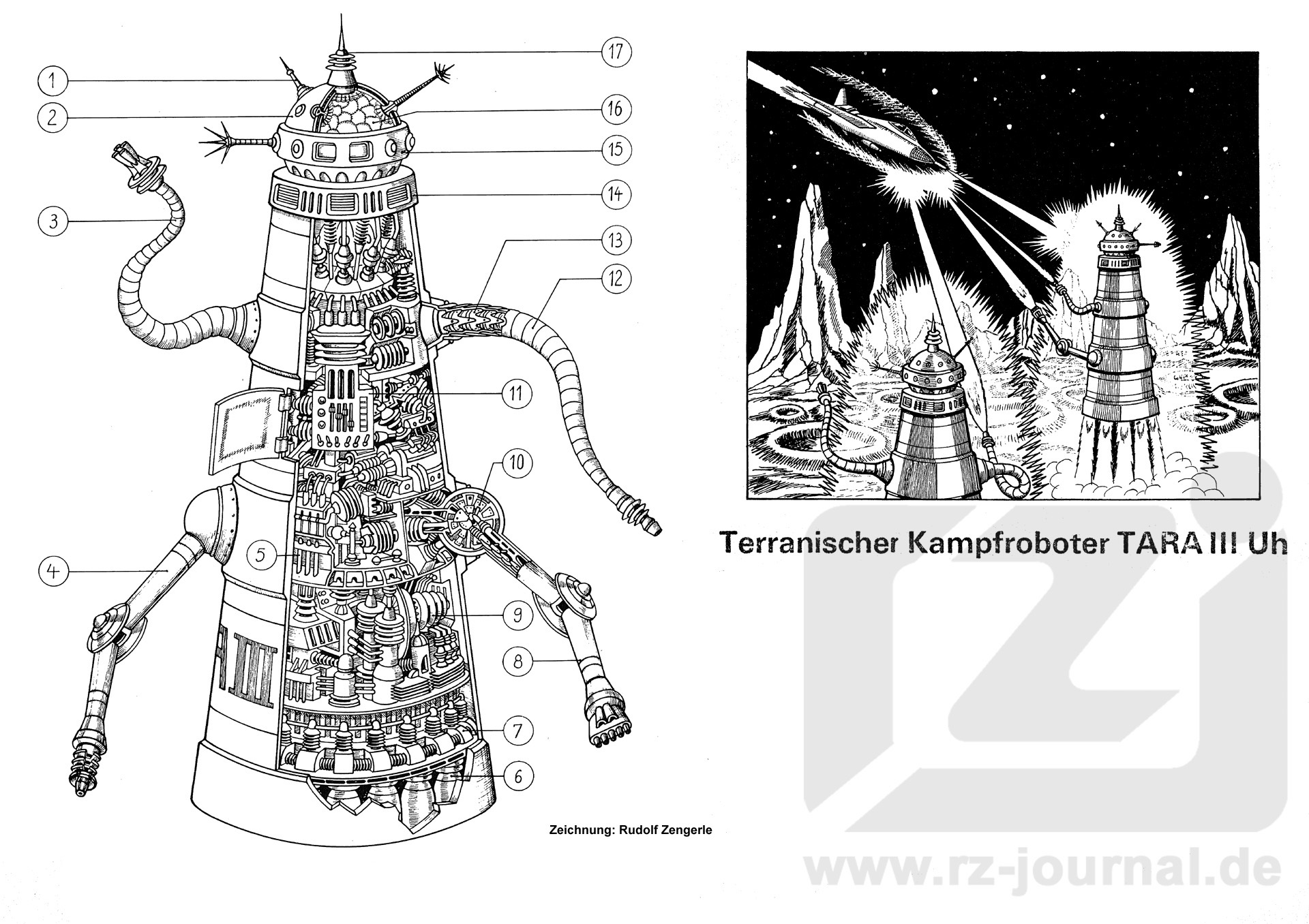
Terranischer
Kampfroboter |
|
|
Allgemeines: Überschwerer Kampfrobot aus YT-Stahl (YT-Stahl ist eine Legierung aus Ynkelonium und Terkonitstahl), Größe 2,50 m, kegelförmig, Grundplatte 90 cm 0, flugfähig in Atmosphäre und Weltraum unter Erreichen von allerhöchsten Beschleunigungswerten, aktionsfähig ebenso über Land und unter Wasser; Grundprogrammierung findet bereits bei der Herstellung statt und zwar nach den „Asimovschen Gesetzen". Der Roboter bewährte sich zum erstenmal bei Perry Rhodans Zeitreise mit dem Nullzeitdeformator. Die mitgeführten Roboter standen unter dem Kommando von Dr. Voigt Gosling. |
|
|
|
|
|
|
|
Zeichnung und Text: © Rudolf Zengerle |
|