|
www.rz-journal.de - © by Bernhard Kletzenbauer und Perry Rhodan - published in PR 1227 LKS - Abdruck mit freundlicher Genehmigung der Pabel-Moewig Verlag KG, Rastatt Die Verwendung der Zeichnungen auf einer eigenen Homepage ist nur mit Genehmigung des Zeichners, des Verlages und unter Benennung der Bezugsquelle und des Copyrightinhabers gestattet. Verlinkung sind nur auf die Originalquelle zulässig. |
|
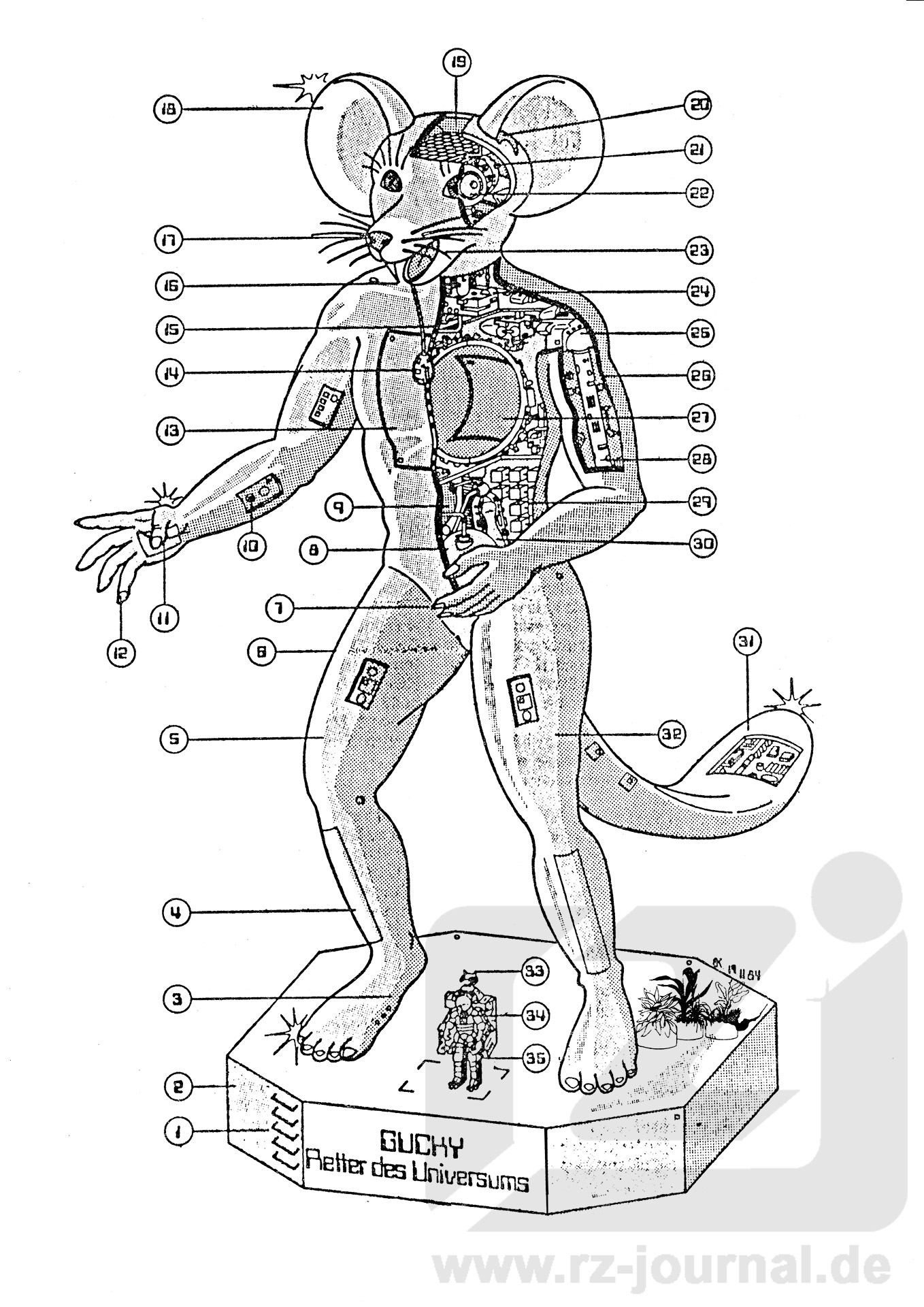
Siganesischer Spezialroboter Gucky |
|
|
Allgemeines: Der Spezialroboter wurde im Jahr 428 NG2 von einem siganeischen Techniker der BASIS mit Hüte von Lea Zeron und der Hamiller-Tube in der Freizeit konstruiert und gebaut. Der Siganese ist ein großer Verehrer von Gucky und kann sich auf diese Weise einen Traum erfüllen und sich beim Benutzen des Roboters fast wie ein Ilt fühlen. Es wurde großer Wert darauf gelegt, das Aussehen, die Bewegungsabläufe und die PSI-Fähigkeiten des Mausbibers möglichst perfekt nachzuahmen. Der Roboter wird von dem Siganesen oft zur beruflichen Arbeit auf der Außenhüile der BASIS oder zur Untersuchung kleiner Asteroidenbrocken verwendet Da der Roboter keine hermetisch dichte Druckzeile besitzt, muss der Bedienende bei Arbeiten im Vakuum einen Schutzanzug tragen. Meist wird der Roboter in der auf Hochglanz polierten Ynkeionlum-Speziallegirung präsentiert. Für Sondereinsätze kann er eine Bioplast- Vollmaske anlegen, mit der er ohne Spezialinstrumente von einem echten Ilt nicht zu unterscheiden ist. Die Bioplastmaske kann auch durch eine holografische Projektion ersetzt werden. Der Innenraum des Roboters wurde, bis auf den Stauraum im Kopf, völlig mit terranisch-siganesischer Mikrotechnik ausgefüllt. Die Zeichnung kann daher nur einige wichtige Aggregate schematisch zeigen. Alle anderen Informationen können über jedes öffentliche Terminal von der Hamiller-Tube abgerufen werden. |
|
|
|
|
|
|
|
Text & Zeichnung: © by Bernhard Kletzenbauer '84 |
|