|
Allgemeines:
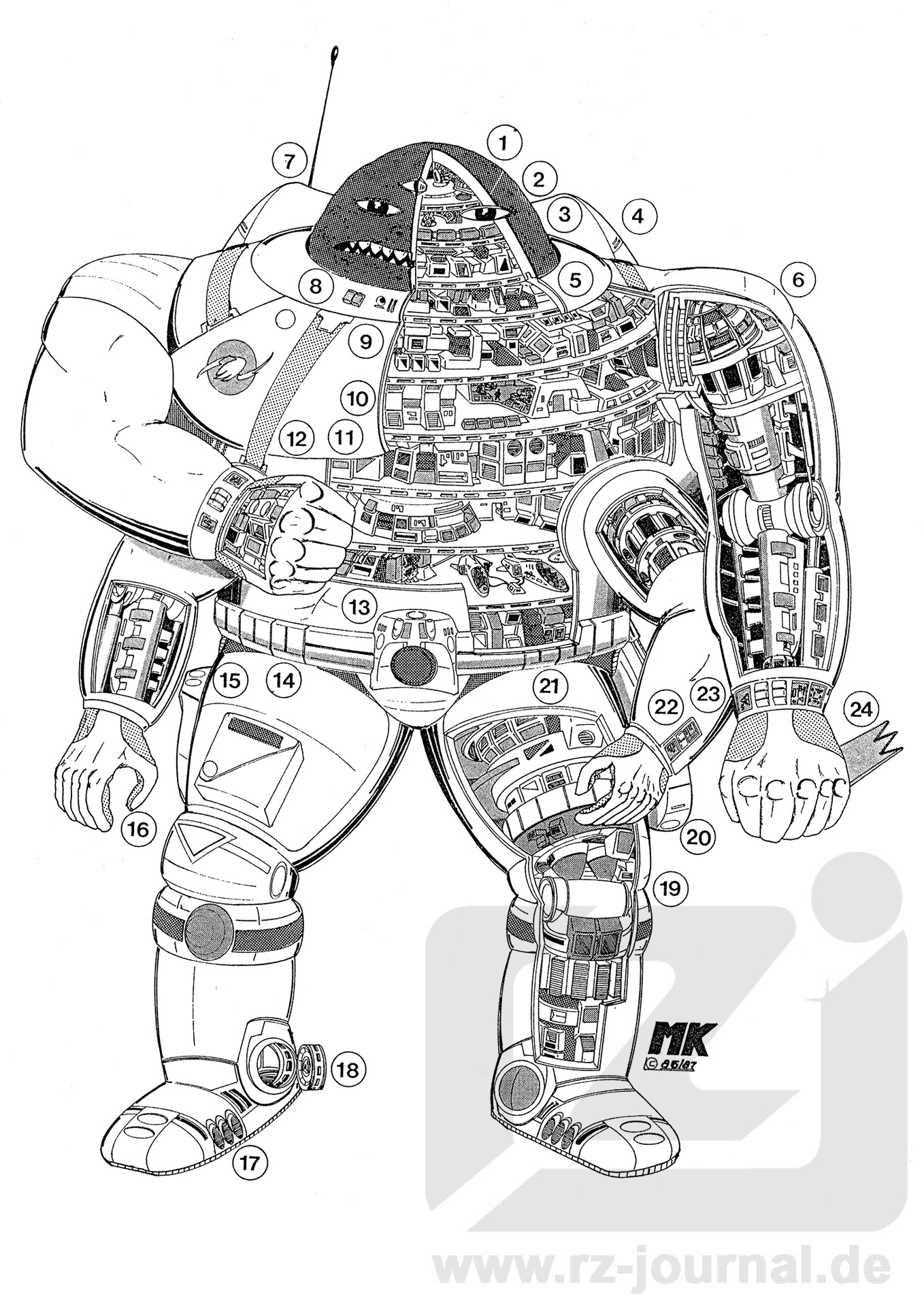
Der
PALADIN VI stellt die konsequente Weiterentwicklung der siganesischen
PALADIN-Technologie dar, die z.T. speziell -für diesen Robottyp erschaffen
wurde. Der erste Prototyp, eingesetzt im Ulebkrieg, verfügte seinerzeit über
Fusionsreaktoren, Hü-Schirm und Impulstriebwerke. Diese wurden beim Typ VI
durch Hypertropzapfer, Paratronschirme und Metagravaggregate ersetzt. Die
Zeichnung zeigt einen authentischen siganesisehen Typ Vl-Plan, mit den traditionellen
Maßen Höhe 4m, Schulterbreite 2,9m und Tiefe 1,5m. Eingesetzt und gebaut
wurde allerdings eine kleinere 3,5m-Version, die auf Wunsch Stygians zusätzlich
auf Enerpsi umgerüstet und mit der Körpermasse der Geheimwaffe Hygorasch
ausgefüllt wurde. Im Jahr 446 NGZ 'desertierte' PALADIN VI/Hygorasch aus der
Sotho-Leibgar- de und schlug sich auf die Seite der GOI.
|
-
Vollbeweglicher
Kopf aus SAC-Ynkenit, im obersten Deck Waffenzentrale
-
Robotische
Pseudoaugen, diesen zur multioptischen Wahrnehmung von Licht und Emissionen
aller Art
-
Hauptzentrale
mit Sitz der SERT-Anlagen zur Kopplung des si- ganesischen Kommandanten mit dem
Hauptkoordinierungssyntron
-
Rückenaggregat
mit Funkanlagen, Waffenprojektoren, Triebwerken und Funkanlagen sowie
halutischem Strukturwandler und als LH-Anlage getarntes Enerpsi-Aggregat
-
Decks
mit Bewegungsanlagen für den Kragen- und Mundbereich sowie
Muskelbewegungssimulatoren, Lautsprecher für Sprache und Sonarcodes und
Rachenladeraum mit Transmitter u. Antigravschacht zu den Laderäumen
-
Vollbewegliches
Schulterkugelgelenk mit Bewegungssyntron, Synchronisatoren, Abschirmprojektoren,
Schirmprojektoren und Muskelsimulationsprojektoren
-
Kombinierte
Normal- und Hyperfunkantenne
-
Kragenteil
der Halut-Kampfkombi mit Schaltelementen, Außenmikrophon und Sensoren,
darunter Notschleuse der Besatzung und Emblem der Kampf- bzw. Drangwäschegruppe
-
Bewegungsanlagen
des Rumpfbereichs sowie schwere Paratron, HÜ- und
Enerpsischutzschildprojektoren, interne Funk- und Ortungsanlagen und
Bewegunskoordinatoren
-
Mannschaftskomplex,
Labors, und Ortungs- und Maschinenzentrale sowie Energiekontrol1syntrons
-
Waffen-
und Triebwerksdeck mit Intervall-, KNK- und Multitrafgeschützen und großem
Metagrav, Antigrav und Impulstriebwerkskomplex
-
Bewegungsmechanismen
der rechten Handlungshand
-
Transmitteranlage,
LH-Anlagen, Hangar mit 2 Drei-Mann-Kampfgleitern und 7 'Raumlinsen' Typ Siga,
Lagerräume und Magazin im Deck darüber Hypertrapzapfer, Gravitrafspeicher,
Laufarmservos und weiteren Allzweck- und Abschirmprojektoren der 3
Hypertropzapfer
|
-
Gürtel
der Halut-Kampfkombi mit magnetischen Halterungen -für Zusatzgeräte und
Spezialgürtelschnalle mit Nabelschleuse und einem Transmitter, dessen
Gegenstation sich im Hangar befindet und der zur Ausschleusung der Beiboote
dient, sowie mit zahlreichen Abschirmprojektoren (Antiortung, etc.)
-
Magnethalfter
-für das schwere halutische Kombigeschütz, in ihm befindet sich ein Anschluss
für das Energieaggregat im Rücken- Tornister
-
Voll
bewegliches Handmodul mit Sensoren
-
Fußteil
des Kampfstiefels mit Traktorprojektoren zum besseren Halt unter niedrigen
Gravitationsbedingungen sowie Antigrav
-
Fersenschleuse
des PALADIN, im inneren befindet sich ein Interntransmitter des Roboters und ein
Verbindungsschacht
-
Teilweise
freigelegtes Kniesegment. Im Gegensatz zu allen anderen PALADINS ist die direkte
Kontaktfläche und inneres Bewegungssegment nicht mehr aus Metall, sondern
besteht aus Farmenergie. Das Vorteil des Systems besteht darin, dass die
absolute Bewegungsfähigkeit des Roboters garantiert wird und das Problem der
Reibung nun nicht mehr besteht. Durch geringfügige Variierung der
Projektionskoordinaten ist eine fast uneingeschränkte Bewegung möglich
-
Kombitasche,
beinhaltet Zusatzgeräte, Waffen, Granaten, Sensoren und ähnliches
-
Unten:
Beinmechanismen mit Abschirmung und Formenergie-'Verstrebungen' Um Erschütterungen
möglichst zu vermeiden, wird das Bein mit Formenergie 'geflutet'.
Oben: Bewegungselemente der Hüfte
-
Mess-
und Analysegeräte des Handgelenks
-
Schaltelemente,
Minibildschirme und Mess- und Kommandogeräte
-
Formenergie-Nahkampf-Schlagbei1,
durch platzsparende SVE- Technik keine aufwendigen Aus- und Einraster der
Metallversion mehr nötig
|