|
www.rz-journal.de - © by Gregor Paulmann und Perry Rhodan - published in PR 1836 - Abdruck mit freundlicher Genehmigung der Pabel-Moewig Verlag KG, Rastatt Die Verwendung der Zeichnungen auf einer eigenen Homepage ist nur mit Genehmigung des Zeichners, des Verlages und unter Benennung der Bezugsquelle und des Copyrightinhabers gestattet. Verlinkung sind nur auf die Originalquelle zulässig. |
|
Galaktische Robottechnologie Mehrzweckrobot |
|
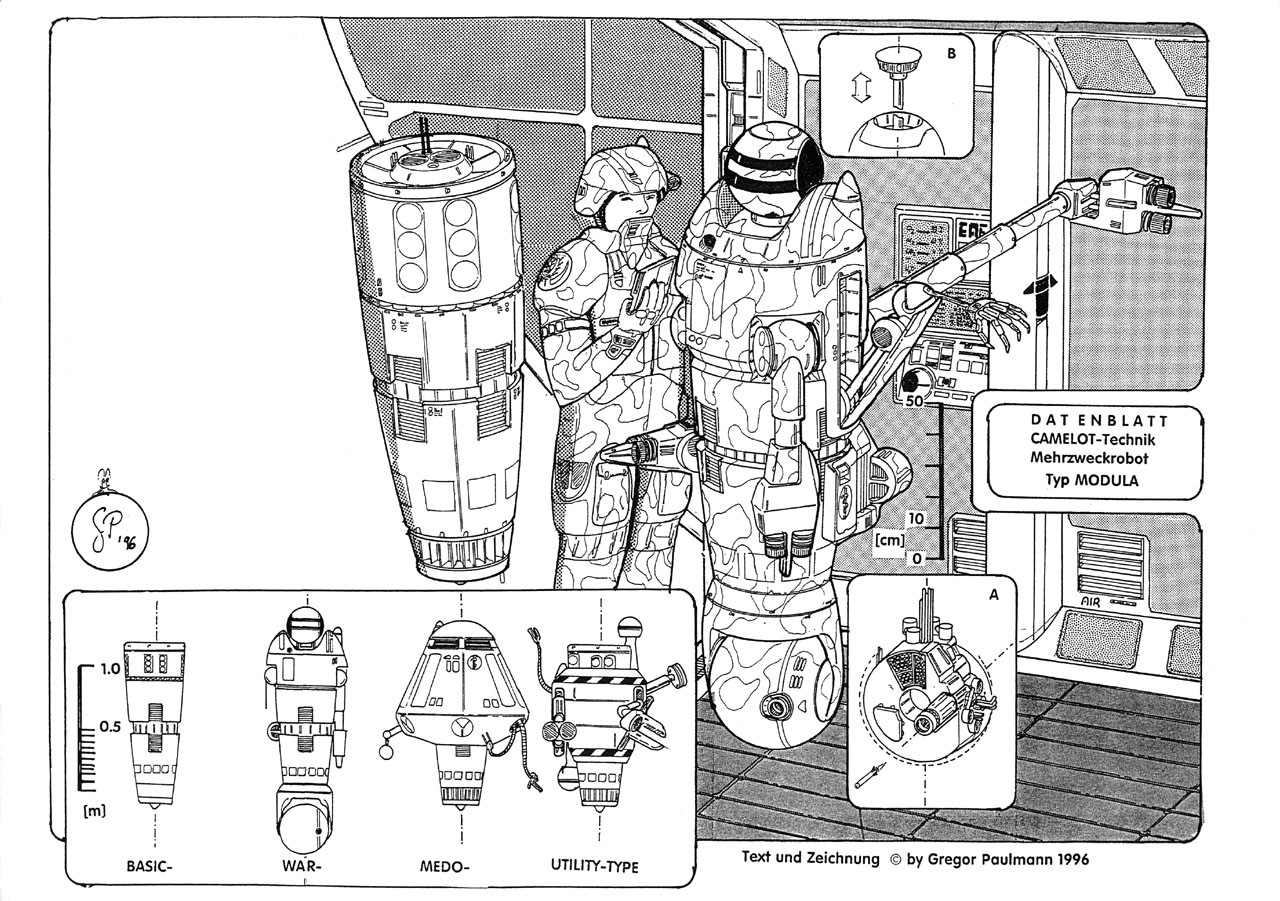
ALLGEMEINES: Die MODULA-Robots sind eine der hochentwickelten Eigenprodukte des CAMELOT-Projektes. Sie entstanden in den dort aufgebauten Kybernetik-Labors unter tatkräftiger Mitarbeit der Siganesen unter Alber Pintoras. Allerdings stellt dieser Robot-Typ keine völlige Neuentwicklung dar. Vielmehr ist er das Endergebnis eines umfangreichen Synergieprojektes, das wohl nur zur Zeit auf CAMELOT stattfinden kann. Man übernahm aus allen sich bei den technologisch führenden galaktischen Völkern im Einsatz befindlichen Robotmodellen die hervorragendsten Eigenschaften und kombinierte sie zu einem neuen Robotkonzept. Das Ergebnis ist der MODULA-Robot der, auf einem Basismodell aufbauend und mit einer Vielzahl von Modulen versehen die verschiedensten Aufgabenbereiche abdecken kann. Das aktuelle Produktionsvolumen umfasst 500 MODULA-Robots sowie eine mehrfache Anzahl von kombinierbaren Funktionsmodulen. Da die Produktionsanlagen auf CAMELOT nicht voll aufgebaut sind, wird der Robot, als eine Vielzahl von Einzelkomponenten, bei verschiedenen führenden galaktischen Firmen unter Decknamen, meist durch die Organisisation TAXIT, in Auftrag gegeben. So ist keine einzelne Firma in der Lage, einen MODULA alleine herzustellen. Modellpalette: BASIC TYPE Zylinderkörper
von 1.30 Meer Höhe, Schulter-Ø 50 cm, Fuß-Ø 30 cm WAR TYPE oberer Zylinderaufsatz mit Zusatz-Ortungssystemen (teilweise ausfahrbar) Ø 30 cm 3 radial angeordnete Waffenarme, ausfahrbar und voll beweglich mit je einem Waffenblock von GENERAL DEFENSE SYSTEMS GDS, Io, bestehend aus 1 Thermostrahler (2 kWatt), 1 Desintegrator, 1 Paraysator und 1 versenkbares Vibratormesser, autarkem Zielsuch/Freund-Feind-Erkennunssystem 1 Rak-Werfer im unteren Kugelsegment, radial um 360°/ azimut um 270° beweglich, mit 1 GDS RW01 für max. 50 Projektile, meist Thermotom-Sprengkörper« selbstlenkend bis zu 200 km Reichweite 1 Gravopuls-Antriebsbooster, bestehend aus je 2 CULMAN 3/1270 A
Innenstrom-Gravo-Jet verstärkter Schutzschirm, Tarnungsdeflektoren, Anti-Ortungs-Störemitter,
Medoset für Verwundetenversorgung, 1 Manipulatorarm, selbstverändernder
Camuflage-Anstrich und eine taktische Speichererweiterung. MEDO TYPE Gesamthöhe
152.5 cm durch konischen Aufsatzadapter UTILUY TYPE Gesamthöhe von 130 cm; mittlerer Adapter mit Zeichnung: im
Vordergrund ein WAR-Type Kampfrobot mit Leitkoordinoter (meist für 1 Robotzug
- 40 Robots verantwortlich) in einer Schleuse, im Hin d ein MODULA-Robot ohne
Zusatzmodule;
Detailzeichnungen A: RakWerfer
Text und Zeichnung © by Gregor Paulmann 1996 Textvorlage aus dem RZJ 96 - Text bei Heftabdruck evtl. abweichend |